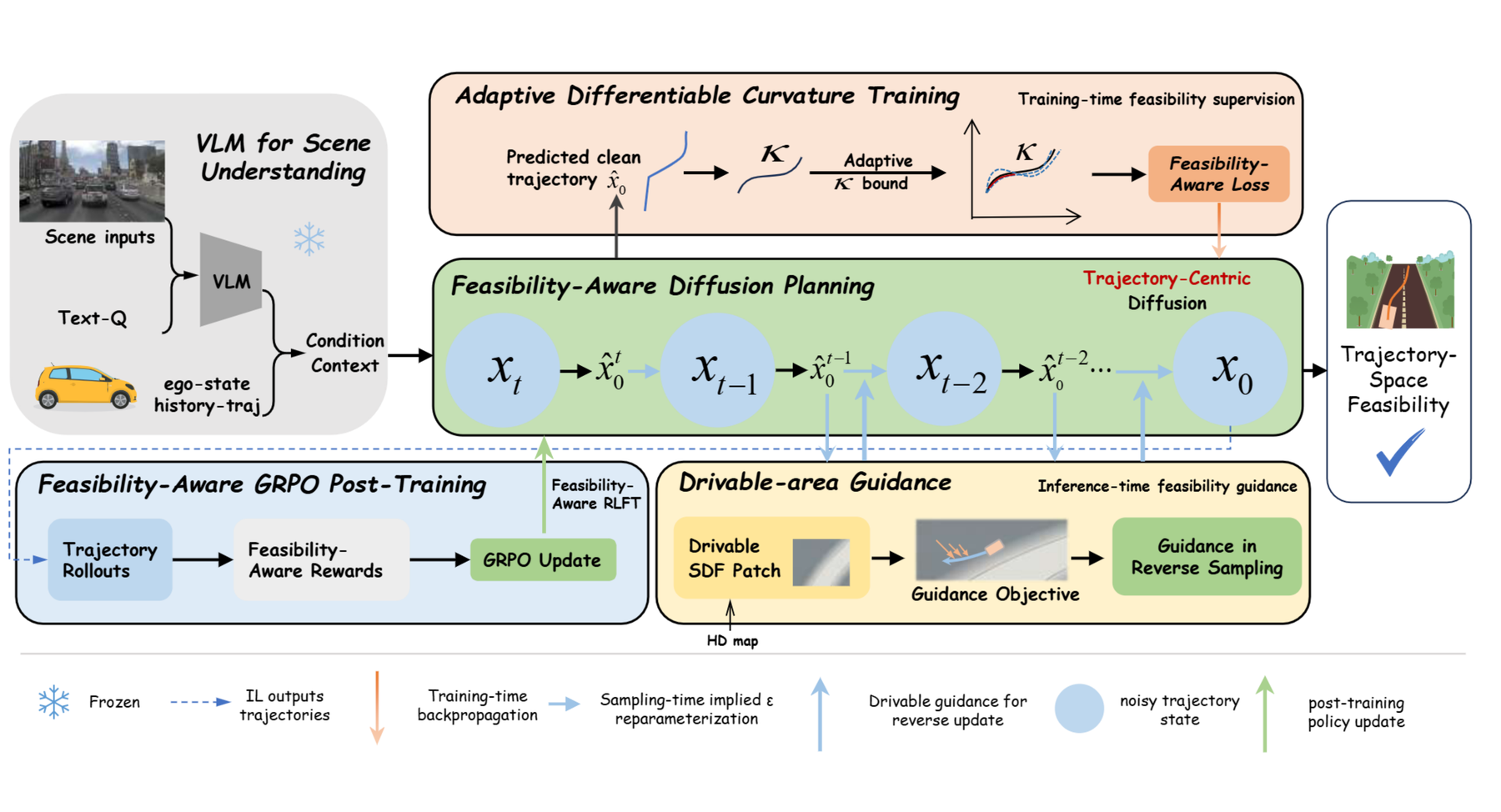
Overview Framework of FeaXDrive. Compared with noise-centric diffusion planning, FeaXDrive adopts a trajectory-centric formulation in which the predicted clean trajectory serves as the unified object for feasibility-aware modeling. On this basis, the method combines feasibility-aware training and inference-time drivable-area guidance to enhance trajectory-space feasibility throughout the diffusion planning process.