Integrated Decision-making and Motion Planning to Enhance Oscilation-free Capability
Motivation
Unstable and Unsmooth motion in Uncertainty Environment:
- Since there is a high-dimensional state/action modeling and the solution process considers the motion evolution of others, both POMDP and game-theory are easy to fall into the dimensionality problem, which makes the algorithm difficult to solve.
- Most existing studies consider decision making and planning/control separately, simple decision results may not be effectively utilized by planning, which tends to make the solution process of motion planning time-consuming, or the planning unable to reach decision expectations, trajectory shaking and even solving failure in dealing with complex scenarios
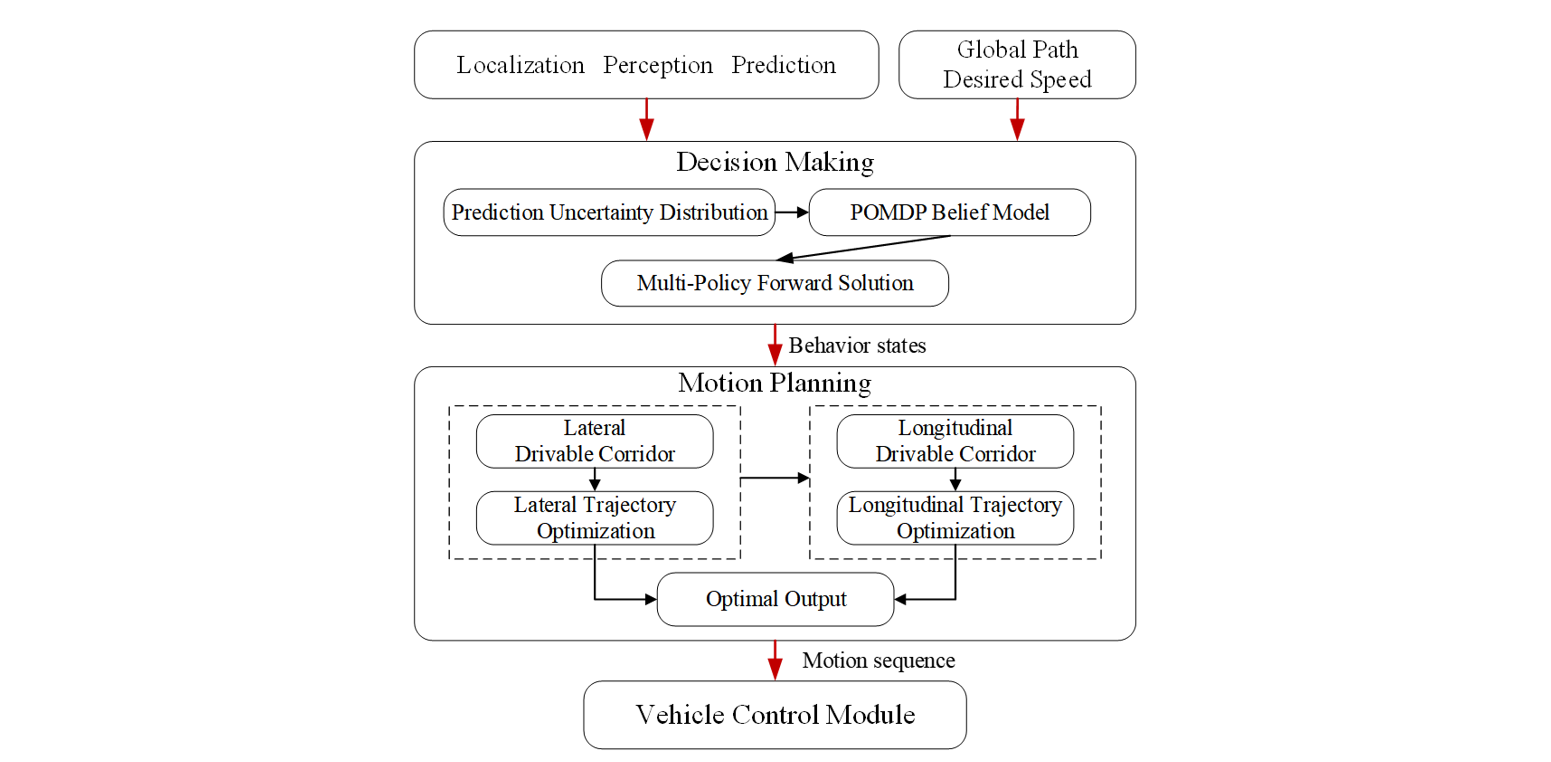
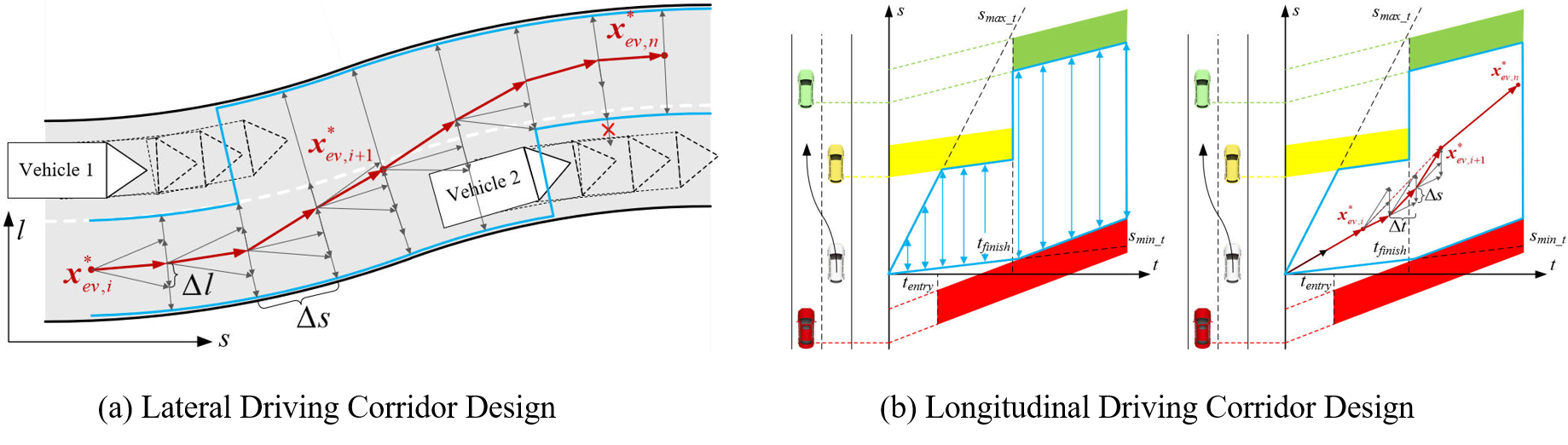
An integrated framework of decision-making and motion planning for autonomous driving focus on the lane change/keeping maneuvers. Firstly, we design a belief POMDP decision planner while building the uncertainty of the prediction trajectories. Through the Multi-policy forward solution, getting the optimal decision action and the corresponding future states with the consideration of the uncertainty risk for surrounding vehicles. Then, based on the decision results of lateral semantic behavior and longitudinal continuous acceleration, we build drivable corridors including the reference state and the related boundary constraints, which provide better suited information for planning to solve the optimal motion sequence more quickly and stably, and improve its consistency with decision module. Finally, we consider the vehicle dynamics and introduce some soft constraints to solve the optimal motion trajectory.
Highlights
- Able to make oscillation-free behavior decisions given biased prediction.
- Able to cut through in the traffic efficiently and safely when being in squeezed.
- Able to accelerate computation efficiency by building a state transfer model based on prediction uncertainty
- ble to reduce the dissonance between decision-making and motion planning.
Some Reults
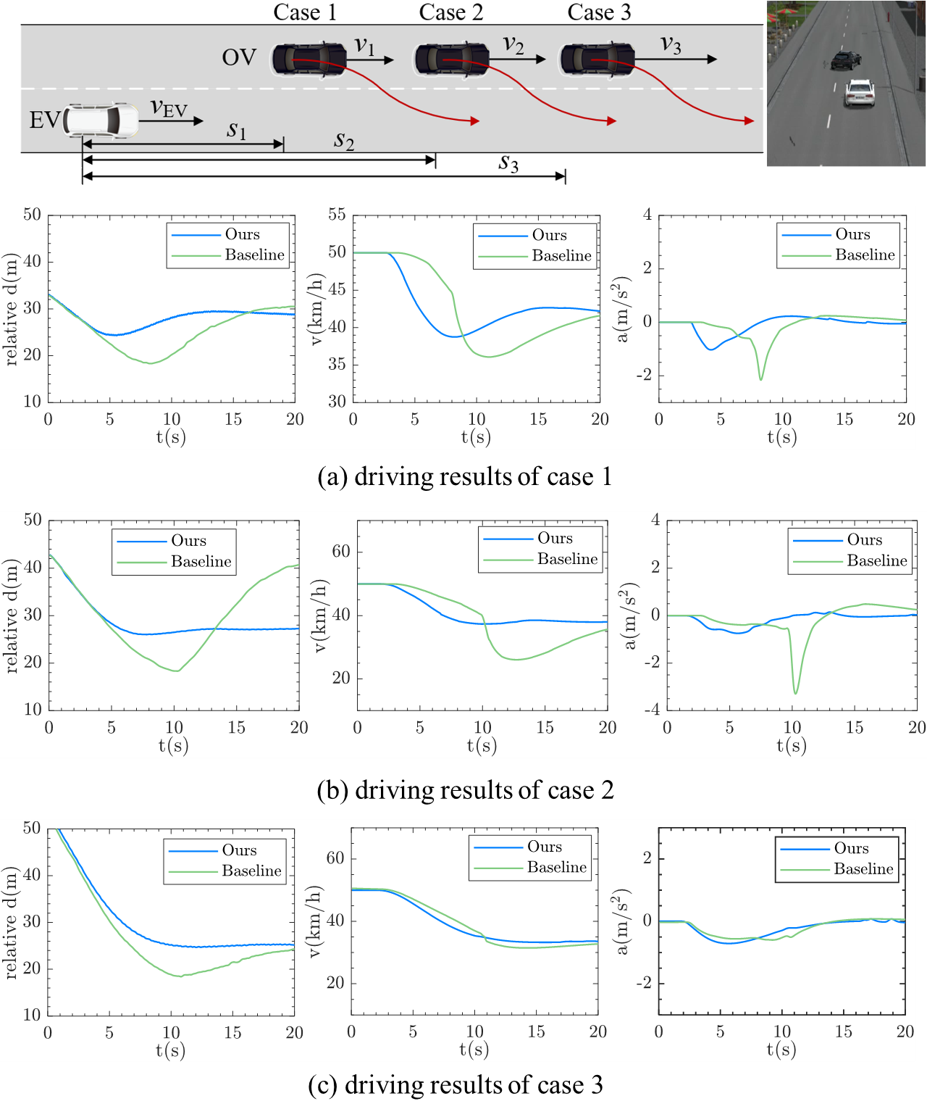
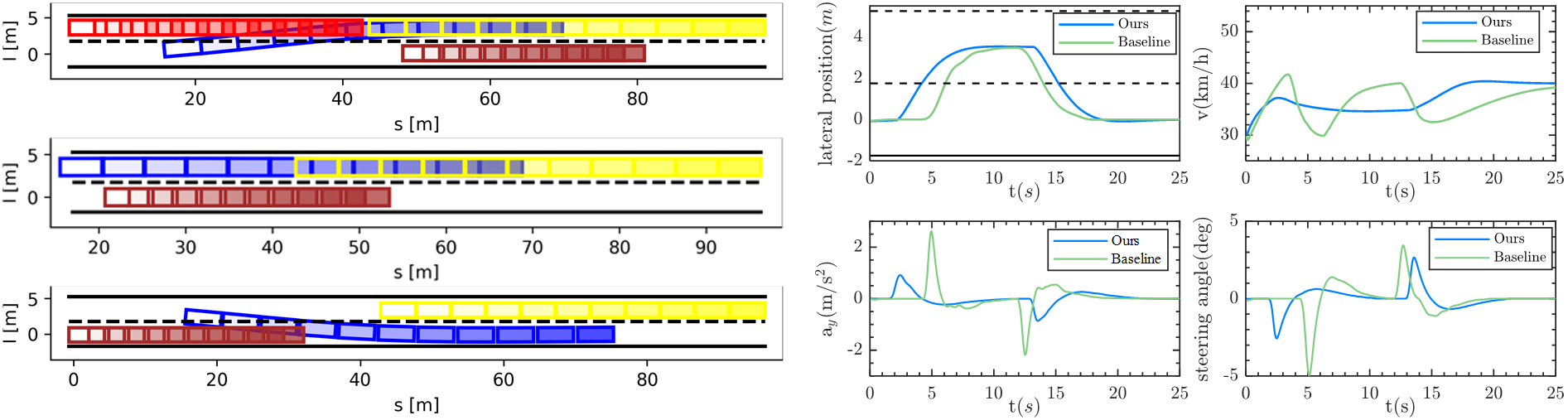
Able to recat to deceleration in advanced in cut-in scenario with smoother acceleration and speed changes. In overtaking scenario, it able to overtake continuously with smoother lane-change driving way. It is also capable of avoiding possible lane-change failures and potential risks associated with reckless lane-change maneuver through uncertainty characterization.
Simulation demo in VTD:
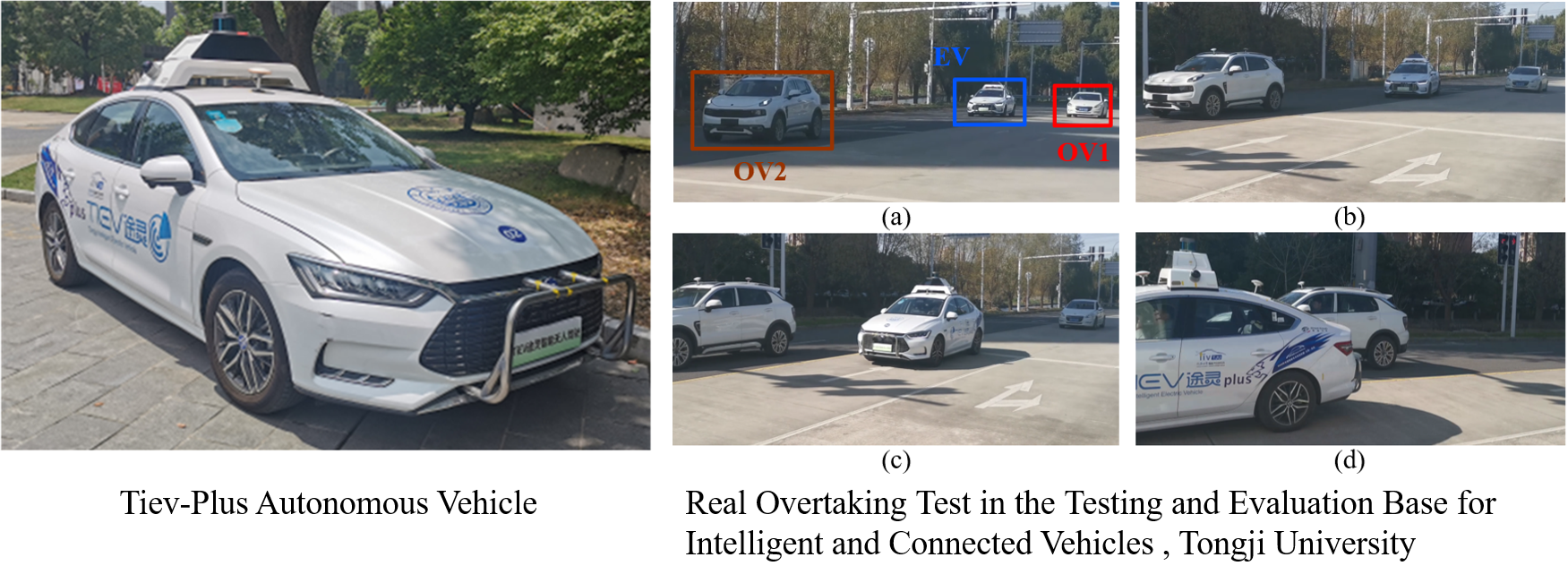
Real Test with our autonomous electric vehicle platform:

Mixed Integer Programming with Hybrid Model Predictive Control
🔎 Motivation
We aim to develop an integrated decision making and motion planning framework that seamlessly achieves efficent and safe driving behaviors with interpretable and verifiable optimization.
🧠 Highlights
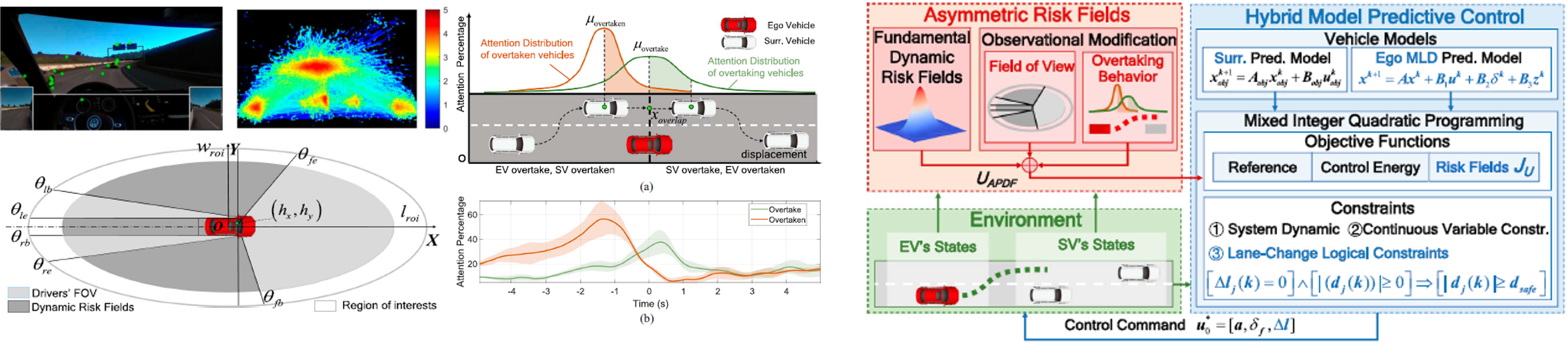
• 𝐇𝐲𝐛𝐫𝐢𝐝 𝐌𝐨𝐝𝐞𝐥 𝐏𝐫𝐞𝐝𝐢𝐜𝐭𝐢𝐯𝐞 𝐂𝐨𝐧𝐭𝐫𝐨𝐥 𝐅𝐫𝐚𝐦𝐞𝐰𝐨𝐫𝐤 We formulate a unified optimization problem that integrates discrete logic decision-making and continuous motion planning using Mixed Logical Dynamic (MLD) modeling.
• 𝐀𝐬𝐲𝐦𝐦𝐞𝐭𝐫𝐢𝐜 𝐑𝐢𝐬𝐤 𝐅𝐢𝐞𝐥𝐝 𝐆𝐮𝐢𝐝𝐚𝐧𝐜𝐞 We propose a novel asymmetric risk field that captures human driver attention characteristics, leading to more reasonable and human-like risk assessment to guide intrinsic discrete behavior optimzation.
Some Results
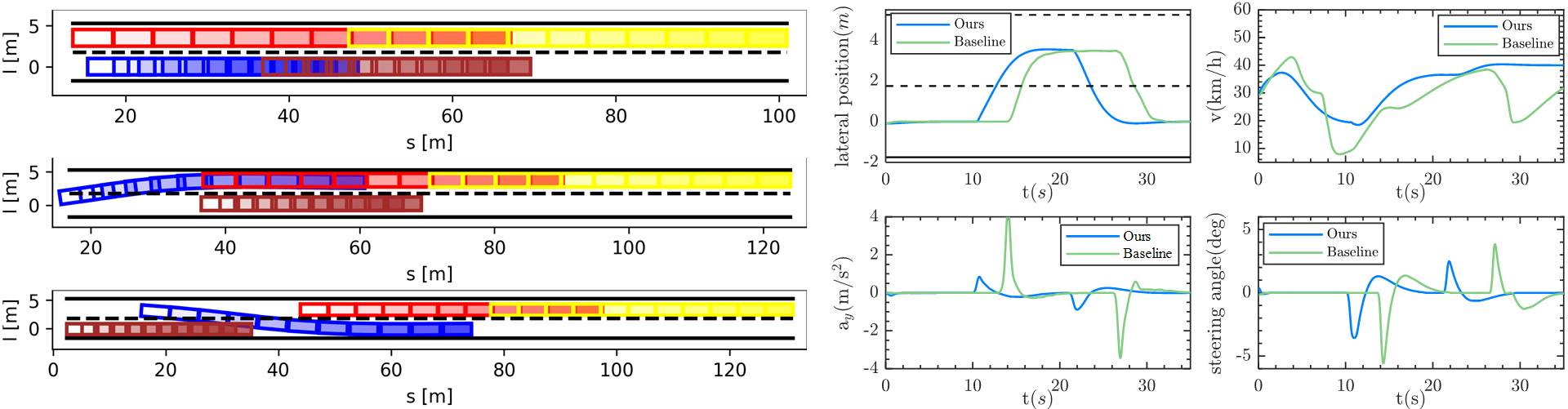
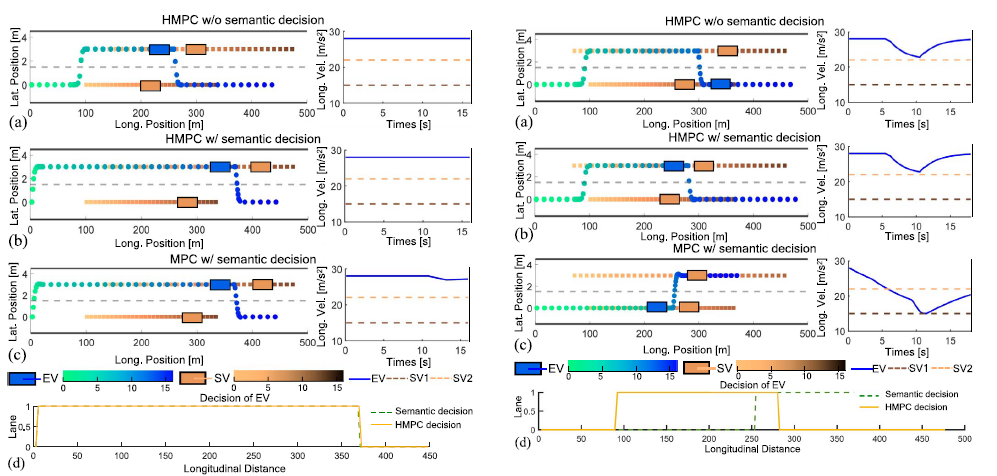
It allows for more efficient lane changing maneuvers in some scenarios wiith more rational lane-changing timing.
Numerical Simulation Results in Matlab:
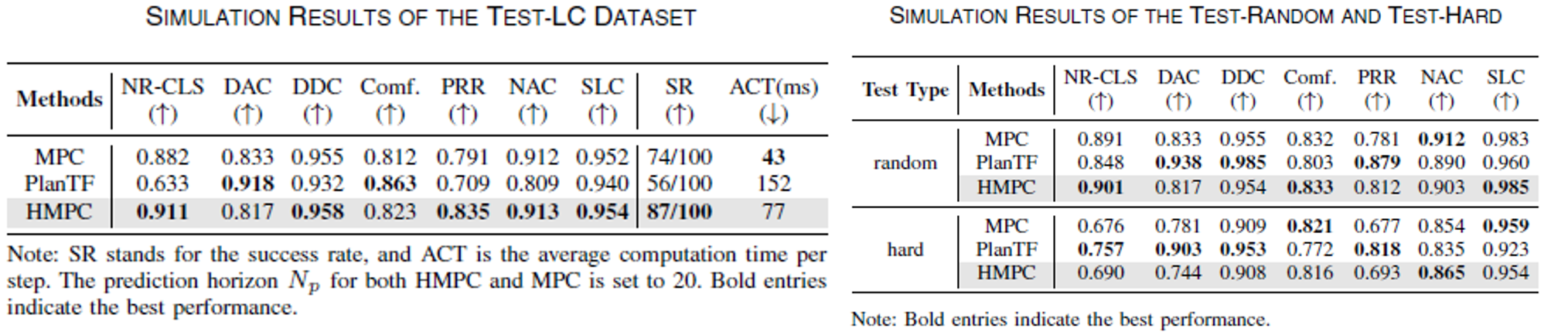
Validation on NuPlan Benchmark:
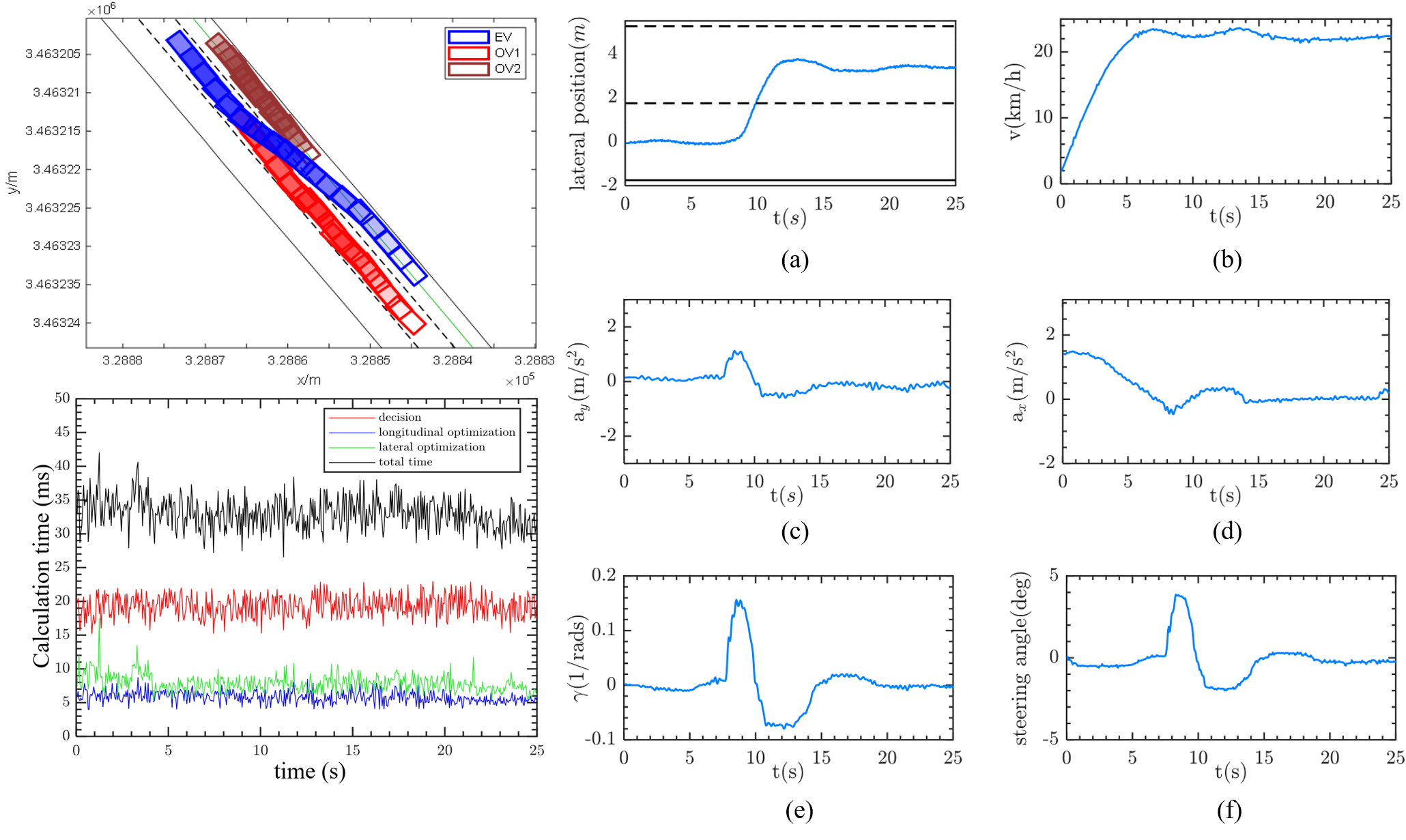
Test on Real-Warld Vehicles:
 <!– ### Trajectory Planning and Tracking Control Based on Hierarchical MPC
<!– ### Trajectory Planning and Tracking Control Based on Hierarchical MPC
A unified framework of trajectory planning and tracking control for autonomous overtaking, which is formed by hierarchical model predictive control, optimizing the lateral and longitudinal movement in two successive steps.
Highlights
- A unified trajectory planning and tracking control framework for autonomous overtaking using hierarchical MPC.
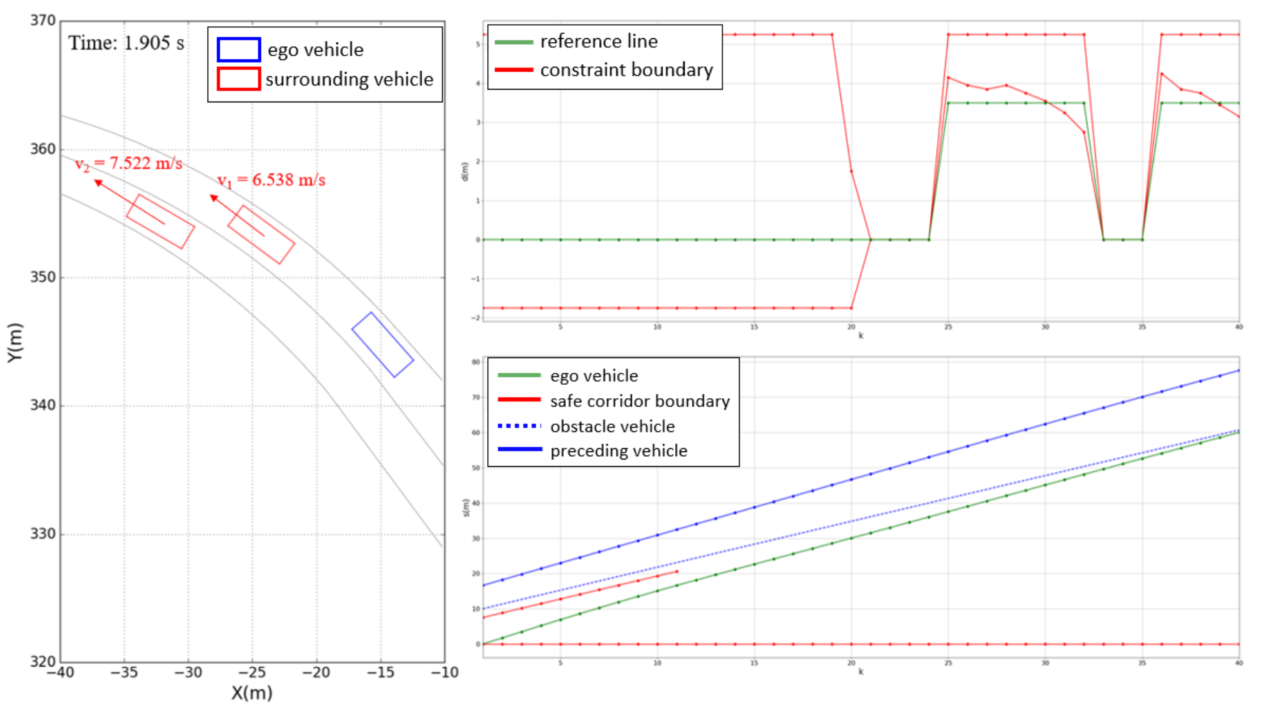
- Safety corridor generation on ST-Graph with different behavior mode.
Some Reults
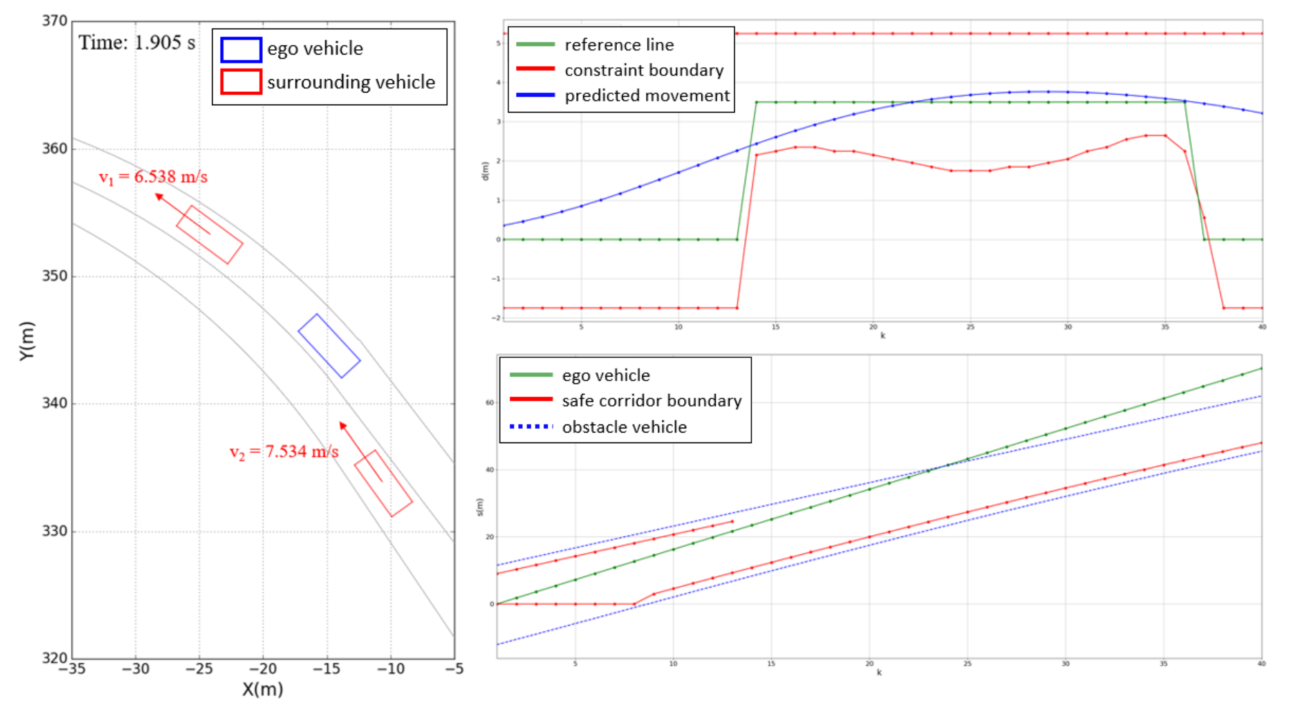
It is able to perform smoothly driving maneuvers such as cornering and overtaking in CARLA simulation.
 –>
–>
Publications:
- Seamless Overtaking Maneuvers for Automated Driving: Integrated Motion Planning Based on Hybrid Model Predictive Control, Bo Leng, Ran Yu, Chengen Tu, Lu Xiong, Arno Eichberger and Zhuoren Li*, IEEE Trans. Ind. Electron., 2026, early access.
- Multi-mode Evasion Assistance Control Method for Intelligent Distributed-drive Electric Vehicle Considering Human Driver’s Reaction, Bo Leng, Zhuoren Li*, Ming Liu, Ce Yang, Yi Luo, Amir Khajepour and Lu Xiong, Chin. J. Mech. Eng. 2025, 38: 102.
- An Integrated of Decision Making and Motion Planning Framework for Enhanced Oscillation-Free Capability, Zhuoren Li, Jia Hu, Bo Leng, Lu Xiong and Zhiqiang Fu, IEEE Trans. Intell. Transp. Syst., vol. 25, no. 6, pp. 5718-5732, June 2024.
- A Seamless Motion Planning Integrating Maneuver Decision Based on Hybrid Model Predictive Control, Chengen Tu, Zhuoren Li, Bo Leng and Lu Xiong, in Proc. IEEE Int. Intell. Transp. Syst., 2023, pp. 3228-3234.
- A Unified Trajectory Planning and Tracking Control Framework for Autonomous Overtaking Based on Hierarchical MPC, Zhuoren Li, Lu Xiong and Bo Leng, in Proc. IEEE Intell. Transp. Syst. Conf. (ITSC), 2022, pp. 937-944.