Parking Path Planning in AVP System
The whole system is consisted of outdoor/indoor localization, parking slot perception, path planning and trakcing control.The overall framework is as following:
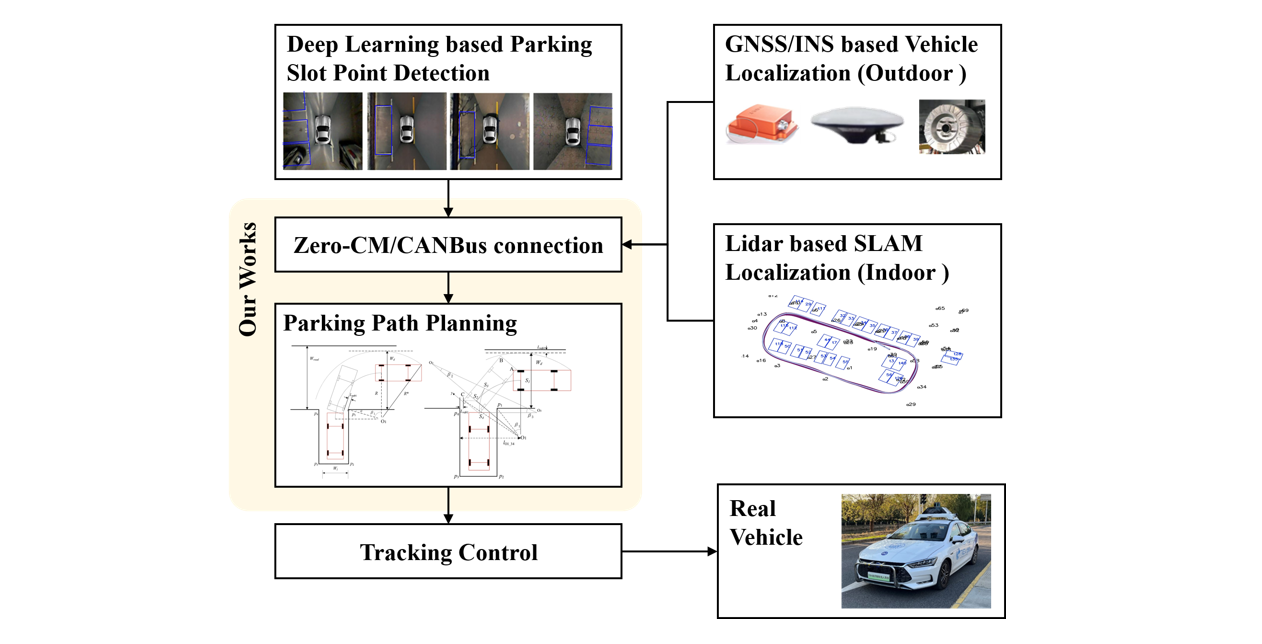
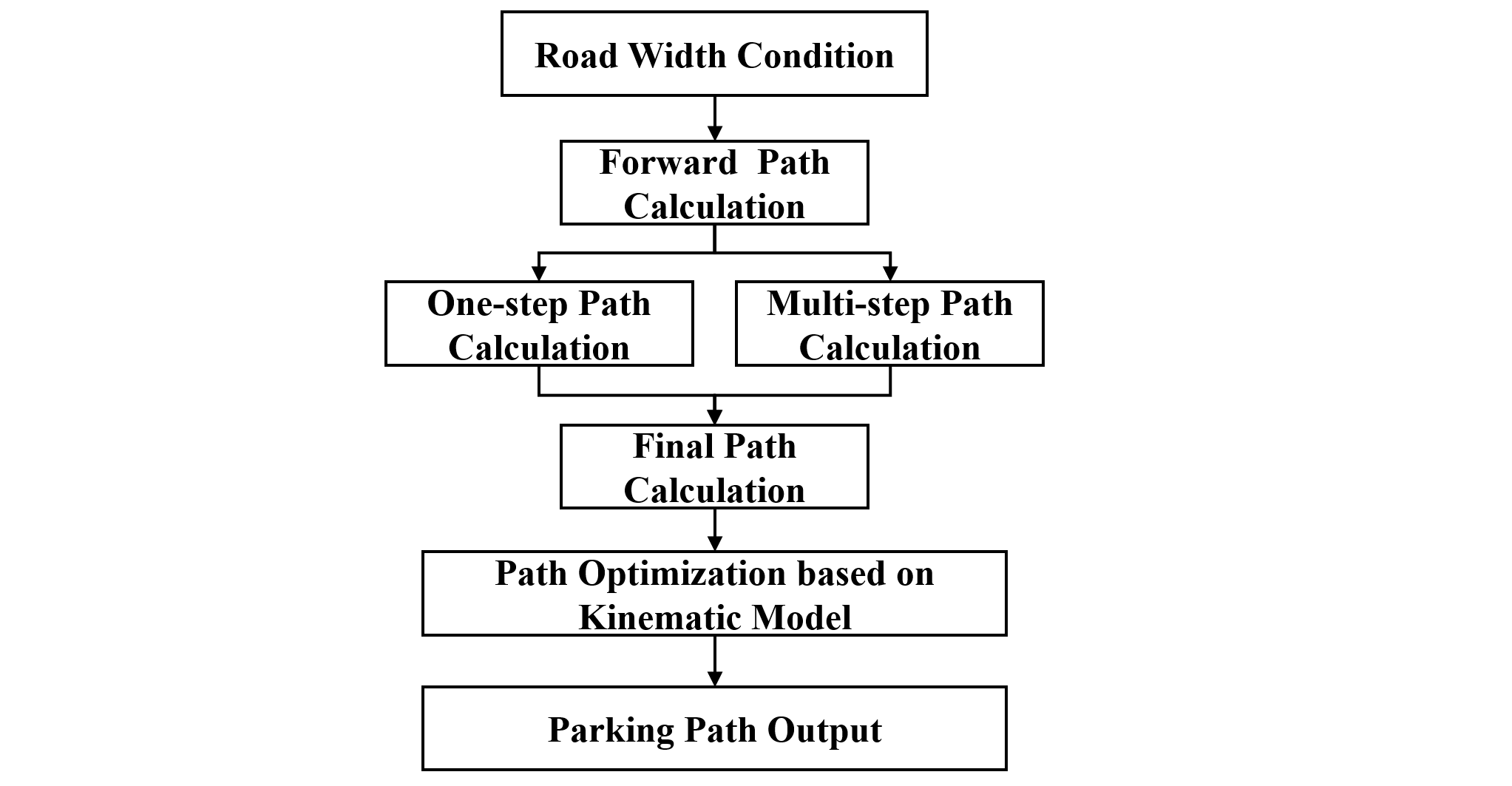
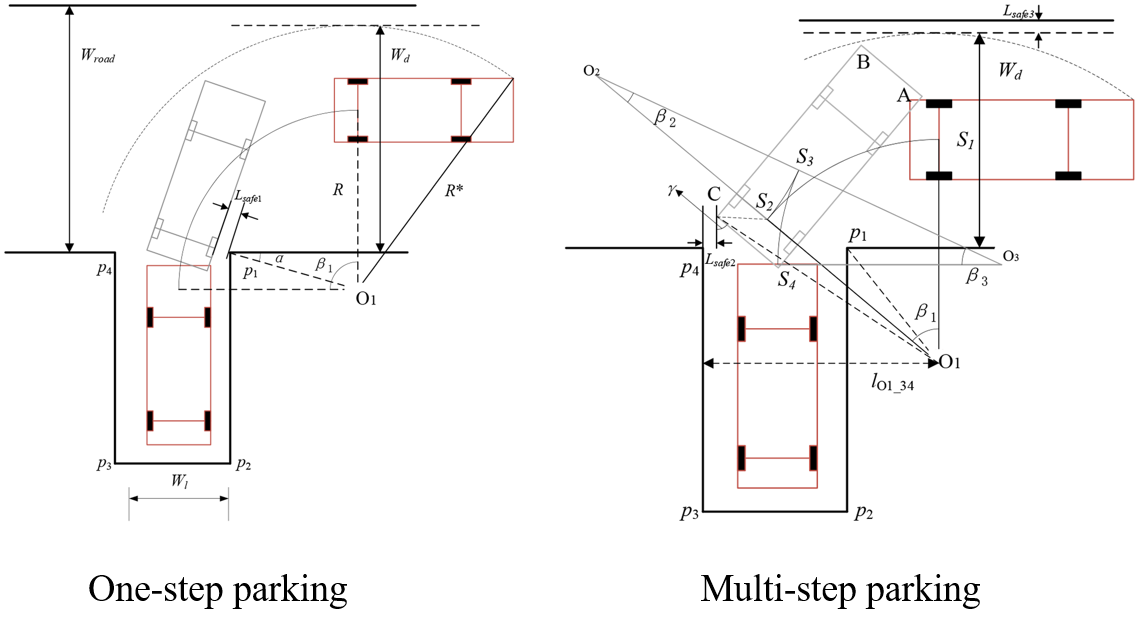
Firstly, the minimum road width required for one-step parking is calculated by considering the geometric relationship between the initial position of the vehicle and the parking slot. Secondly, the parking path is determined based on the collision constraints of the parking slot. Finally, we establish the vehicle kinematics error model and use the MPC algorithm to optimize the parking path.
AVP system demo in Tongji University:

This research havs supported many engineering projects
AVP system for SAIC Motor Corporation, Ltd. (mass-produced electric vehicle: Marvel X)

AVP system for New Energy Vehicle Corporation, Jiangxi Jiangling Motors Group.


Autonomous Parking of Tiev-Plus vehicl for China Future Challenge of Intelligent Vehicles

Publications:
- Path Planning Method for Perpendicular Parking Based on Vehicle Kinematics Model Using MPC Optimization, Zhuoren Li, Lu Xiong, Bo Leng, Zhiqiang Fu, Dequan Zeng, Yiming Hu and Mingzhi Wu, SAE Technical Papers, 2022-01-0085, 2022.
- Efficient and Flexible Autonomous Parking Planning based on Adaptive Multi-Step Motion Primitives, Bo Leng, Zhiwen Chen, Zhuoren Li* and Lu Xiong, Journal of Intelligent Transportation Systems. (under review, R1)