Hybrid Action Based Reinforcement Learning for Multi-Objective Compatible Autonomous Driving
Collaborating student: Guizhe Jin, 2nd-year Gruaduate Student.
Motivation
- Coordinate both stability and flexibility of driving maneuver.
- Compating multi-attributes reward during RL policy training.
- Facilitating the policy exploration for finding global optimal solution.
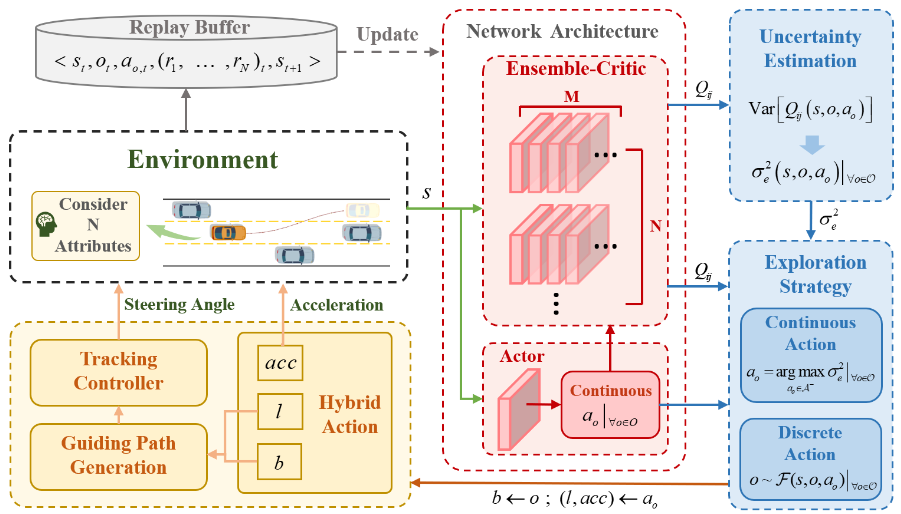
Simultaneously considering the longterm discrete lane-change behavior goal and short-term realtime vehicle control. A hierarchical Reinforcement Learning method with a hybrid action space is designed to enhance driving stability and smoothness based on parameterized trajectory actions.
Highlights
- Designing a hybrid action structure including long-horizon behavior action and trajectory parameters, and short-horizon control command.
- Constructing a multi-critic approach to compat efficiency reward and safety reward during RL policy training.
- Proposing an epistemic uncertainty-based exploration strategy to improve sample efficiency and comprehensive learning performance.
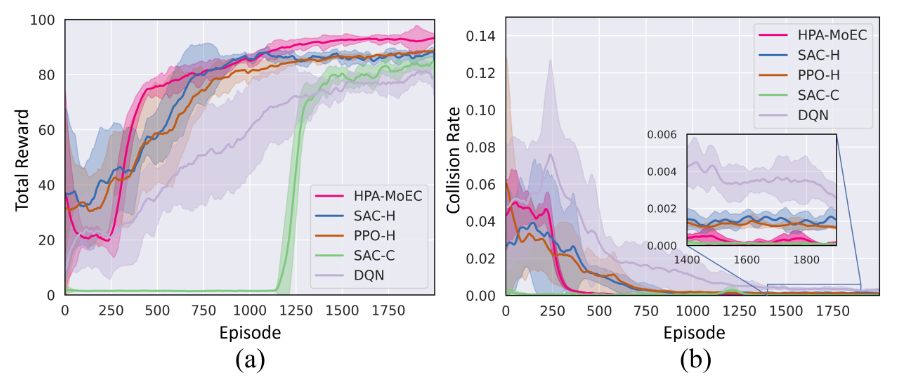
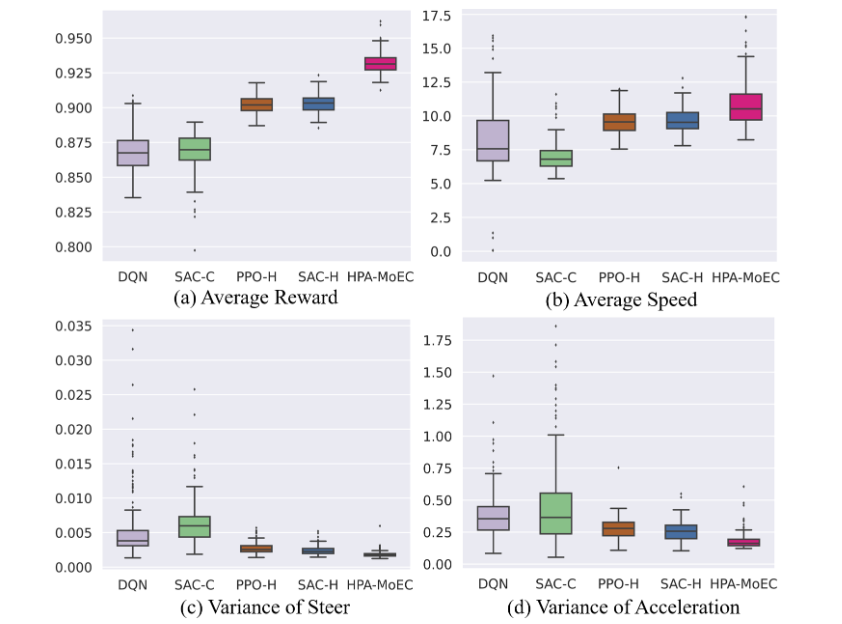
Some Reults
Stability Enhanced DRL with Parameterized Trajectory Action
Collaborating student: Guizhe Jin, 2nd-year Gruaduate Student.
Motivation
When DRL directly control the vehicle’s motion:
- The output commands are easy to change continuously whent DRL agent directly generates the control command.
- The control commands generated in real-time are prone to sudden changes in dynamically changing environments due to the lack of long-term motion planning.
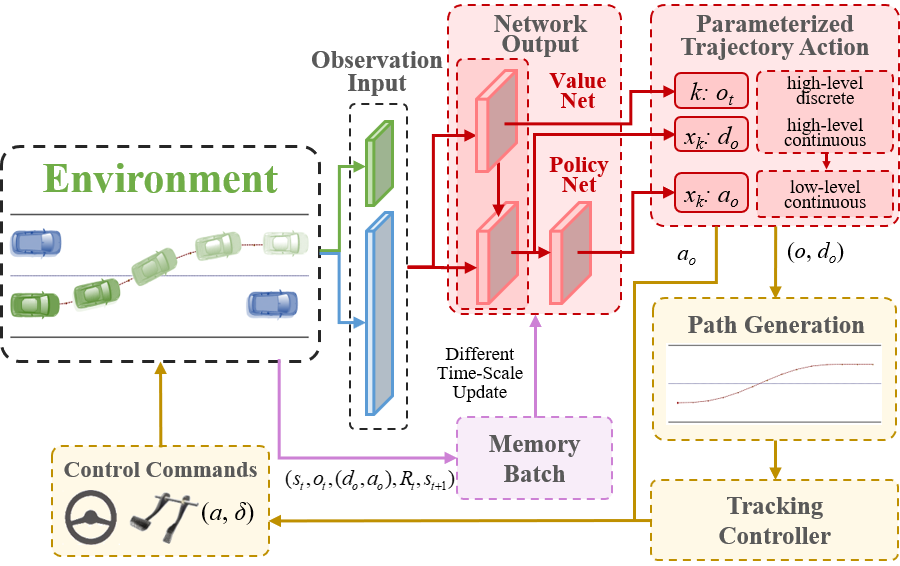
Simultaneously considering the longterm discrete lane-change behavior goal and short-term realtime vehicle control. A hierarchical Reinforcement Learning method with a hybrid action space is designed to enhance driving stability and smoothness based on parameterized trajectory actions.
Highlights
- Proposes a stability enhanced hierarchical reinforcement learning framework to achieve smooth and flexible driving behavior in dynamic traffic environment.
- Enables RL agent to participate in trajectory generation, where the trajectory parameter action is used to generate future motion path that adapt to various scenes.
- Realizes hybrid action output based on parameterized action space, hence the discrete and continuous actions have the optimal consistency.
Some Reults
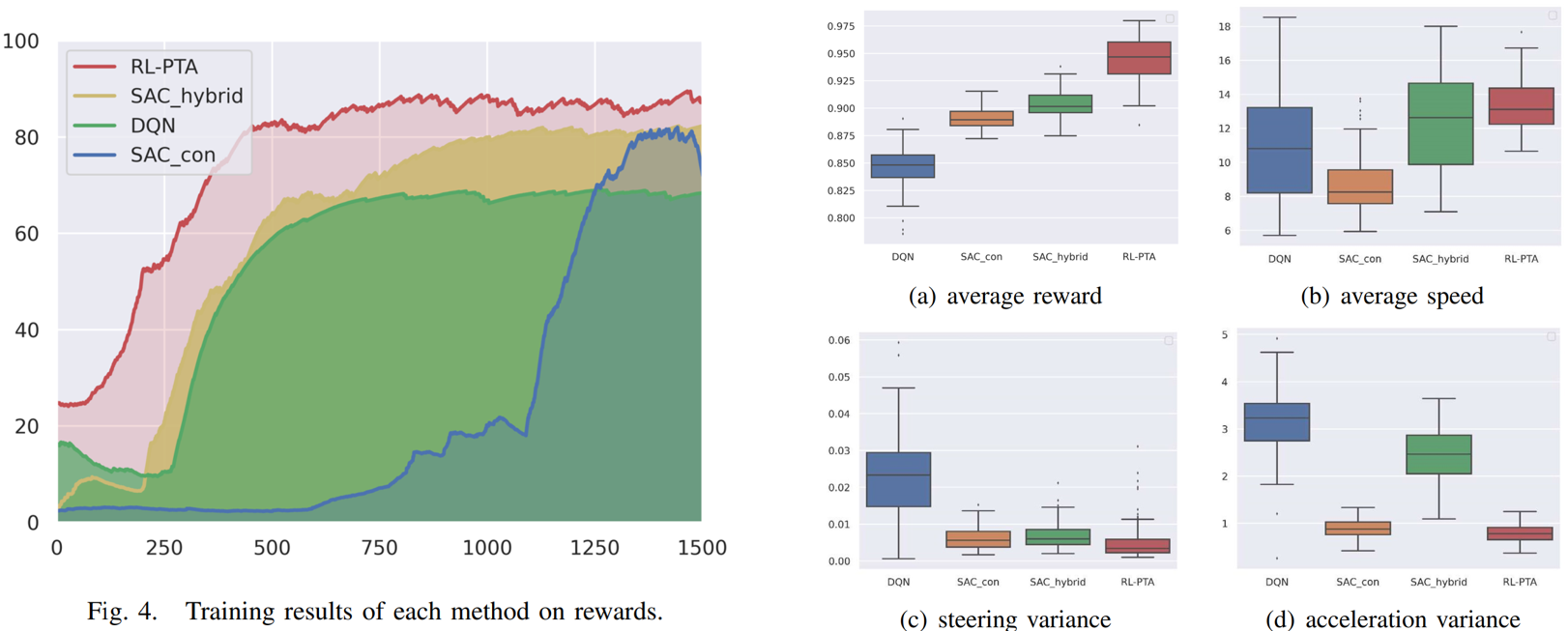 The proposed hierarchical Reinforcement Learning method with hybrid Parameterized Trajectory Actions (RL-PTA) greatly reduces the ocsillation of the acceleration and steering command, while ensuring maneuvering flexibility and driving efficiency.
The proposed hierarchical Reinforcement Learning method with hybrid Parameterized Trajectory Actions (RL-PTA) greatly reduces the ocsillation of the acceleration and steering command, while ensuring maneuvering flexibility and driving efficiency.
Publications:
-
Multi-Timescale Hierarchical Reinforcement Learning for Unified Behavior and Control of Autonomous Driving, Guizhe Jin, Zhuoren Li, Bo Leng, Ran Yu, Lu Xiong and Chen Sun, IEEE Robot. Autom. Lett., vol. 10, no. 12, pp. 12772-12779, 2025.
-
Zhuoren Li, Guizhe Jin, Ran Yu, Bo Leng and Lu Xiong, “Interaction-Aware Deep Reinforcement Learning Approach Based on Hybrid Parameterized Action Space for Autonomous Driving,” SAE Int. J. Adv. & Curr. Prac. in Mobility, 2025, 7(4):1562-1572. PDF, DOI.
-
Guizhe Jin, Zhuoren Li, Bo Leng, Wie Han and Lu Xiong, “Stability Enhanced Hierarchical Reinforcement Learning for Autonomous Driving with Parameterized Trajectory Action.” in Proc. IEEE Int. Conf. Intell. Transp. Syst. (ITSC), 2024, pp. 3020-3026.
Submitted/In Progress:
- Hybrid Action Based Reinforcement Learning for Multi-Objective Compatible Autonomous Driving, Guizhe Jin, Zhuoren Li, Bo Leng, Wei Han, Lu Xiong and Chen Sun, IEEE Trans. Neural Netw. Learn. Sys. (under review, R1). arXiv.