Zhuoren Li
Ph.D. Student
Institute of Intelligent Vehicles
School of Automotive Studies Tongji University, Shanghai, China
👋 Greetings! I am Zhuoren Li. I received my Ph.D. from Tongji University affiliated with the Institute of Intelligent Vehicles(TJU-IIV), under the supervision of Prof. Lu Xiong after obtaining my bachelor’s degree in Engineering Mechanics from Tongji University. I am also privileged to be co-advised by Prof. Jia Hu, Prof. Nan Li and Assoc. Prof. Bo Leng.
🚀 I have been serving as the Student Director of the Intelligent Decision and Control Research Group at TJU-IIV. I lead the team in research on safe reinforcement learning, interactive decision-making, optimization-based motion planning and trajectory planning on unstructured roads. Additionally, I have been involved in 4 engineering projects, 7 government projects, and contributed as a key participant to more than 10 funding proposals.
📈 My current research interest includes Safe Reinforcement Learning for Motion Planning of Autonomous Vehicles, Interactive Decision-Making, and Fundation Model Enhanced E2E Autonomous Driving, etc.
I am currently seeking a postdoctoral position and would welcome opportunities to collaborate on research at the intersection of learning, planning, and safety.
📬 I’m always open to collaborations—please feel free to reach out!
🔥 News
• 2025.10 : 🎉🎉 One Paper on Multi-timescale Hierarchical RL for Autonomous Driving has been accepted by IEEE Robot. Autom. Lett. . (Q1, if 5.3)
• 2025.09 : 🎉🎉 One Paper on LLM-enhanced RL for Autonomous Driving has been accepted by 39th Annu. Conf. Neural Inf. Proces. Syst (NeurIPS) , 2025.
• 2025.08 : 🎉🎉 One Paper on Convergent Harmonious RL for Autonomous Lane Changing has been accepted by IEEE Trans. Intell. Transp. Syst. (Q1, if 8.4)
• 2025.06 : 🎉🎉 One Paper on Multi-mode Evasion Assistance Control considering Human Driver’s Reaction has been accepted by Chin. J. Mech. Eng. (Q1, if 4.5)
• 2025.03 : 🎉🎉 One Paper on safe RL for Lane Change Decision-Making has been accepted by Chin. J. Mech. Eng. (Q1, if 4.5)
• 2024.10 : 🎉🎉 One Paper on Interaction-Aware RL won the SAE International Outstanding Technical Paper Award in SAE ICVS 2024.
• 2024.07 : 🎉🎉 One Paper on Hybrid Parameterized Action Space-based RL for Autonomous Driving has been accepted by IEEE Intell. Transp. Syst. Conf. (ITSC) 2024.
• 2023.10 : 🎉🎉 One Paper on POMDP-based Motion Planning for Enhanced Oscillation-Free Capability has been accepted by IEEE Trans. Intell. Transp. Syst. (Q1, if 8.4)
• 2023.07 : 🎉🎉 Two Paper on safe RL Decision-Making, and Hybrid MPC-based Motion Planning have been accepted by IEEE Intell. Transp. Syst. Conf. (ITSC) 2023.
📝 Research Experiences
📖 Publications
Journal & Conference Publications:
-
Seamless Overtaking Maneuvers for Automated Driving: Integrated Motion Planning Based on Hybrid Model Predictive Control, Bo Leng, Ran Yu, Chengen Tu, Lu Xiong, Arno Eichberger and Zhuoren Li*, IEEE Trans. Ind. Electron., 2026. (accepted)
-
Multi-Timescale Hierarchical Reinforcement Learning for Unified Behavior and Control of Autonomous Driving, Guizhe Jin, Zhuoren Li, Bo Leng, Ran Yu, Lu Xiong and Chen Sun, IEEE Robot. Autom. Lett., vol. 10, no. 12, pp. 12772-12779, 2025.
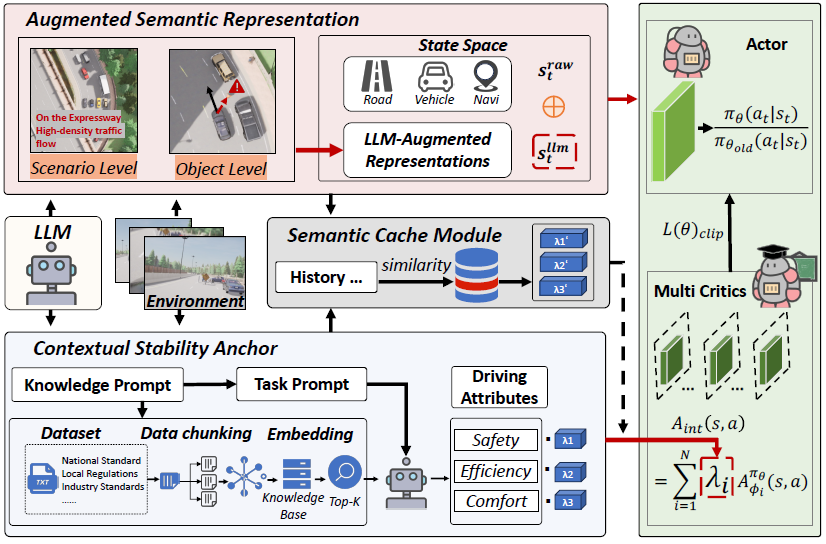
- HCRMP: A LLM-Hinted Contextual Reinforcement Learning Framework for Autonomous Driving, Zhiwen Chen, Hanming Deng, Zhuoren Li*, Huanxi Wen, Guizhe Jin, Ran Yu and Bo Leng*, Adv. Neural Inf. Process. Syst., 2025. (accept)
-
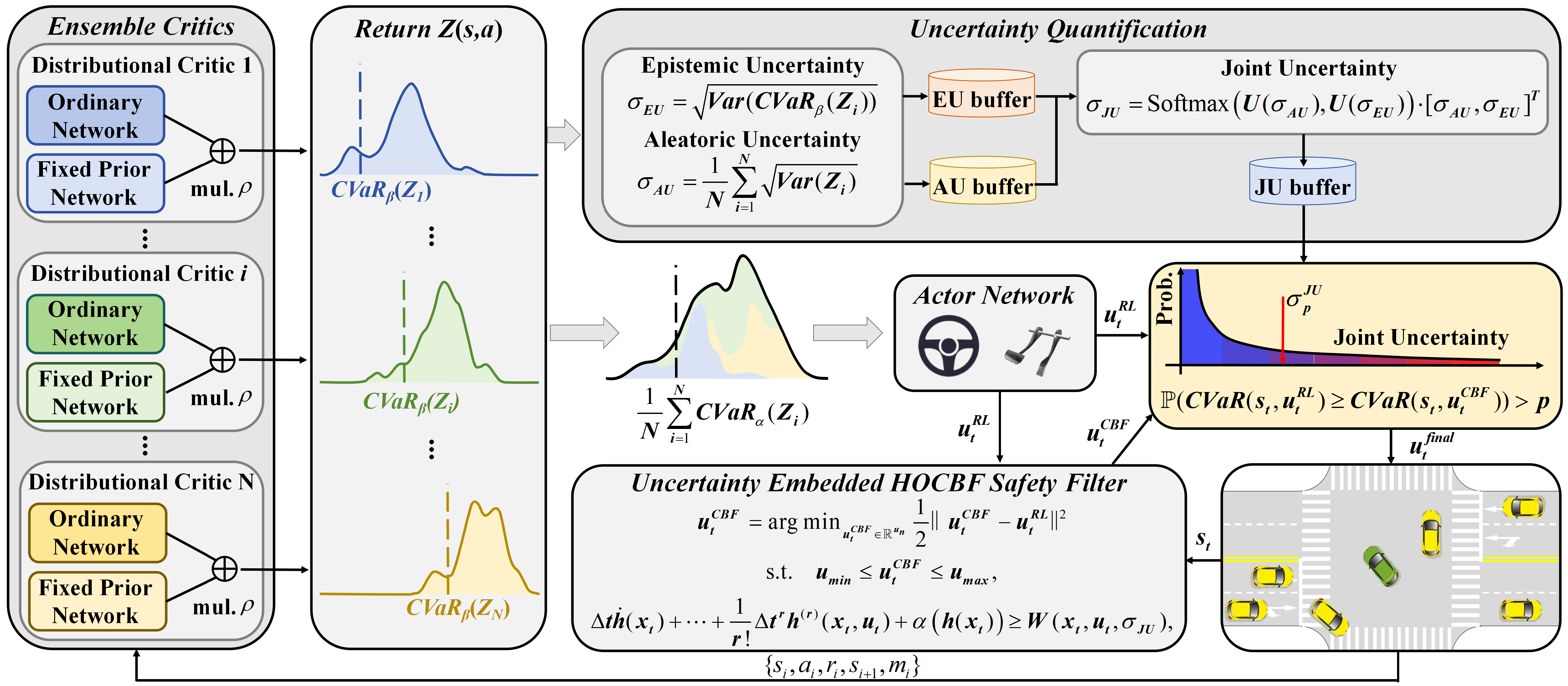
Uncertainty-Aware Safety-Critical Decision and Control for Autonomous Vehicles at Unsignalized Intersections, Ran Yu, Zhuoren Li*, Lu Xiong, Wei Han and Bo Leng, IEEE Intell. Transp. Syst. Conf. (ITSC), 2025. (accept)
-
Convergent Harmonious Decision: Lane Changing in a more Traffic Friendly Way, Ruolin Yang, Zhuoren Li, Bo Leng, Lu Xiong and Xin Xia, IEEE Trans. Intell. Transp. Syst., vol. 26, no. 11, pp. 20334-20347, 2025.
-
Multi-mode Evasion Assistance Control Method for Intelligent Distributed-drive Electric Vehicle Considering Human Driver’s Reaction, Bo Leng, Zhuoren Li*, Ming Liu, Ce Yang, Yi Luo, Amir Khajepour and Lu Xiong, Chin. J. Mech. Eng. 2025, 38: 102.
-
Rule-Guidance Reinforcement Learning for Lane Change Decision-making: A Risk Assessment Approach, Lu Xiong, Zhuoren Li, Danyang Zhong, Puhang Xu and Chen Tang, Chin. J. Mech. Eng. 2025, 38:30.
-
Interaction-Aware Deep Reinforcement Learning Approach Based on Hybrid Parameterized Action Space for Autonomous Driving, Zhuoren Li, Guizhe Jin, Ran Yu, Bo Leng and Lu Xiong, SAE Int. J. Adv. & Curr. Prac. in Mobility, 2025, 7(4):1562-1572.
-
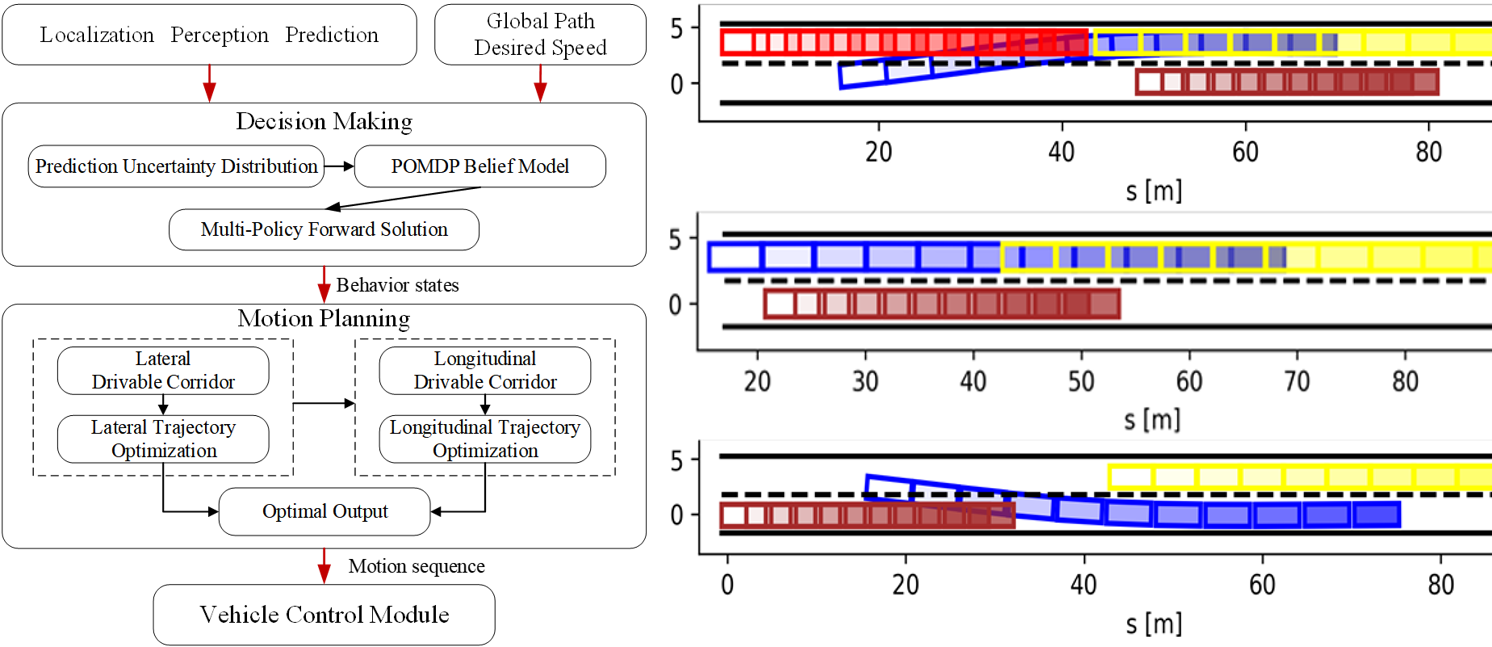
An Integrated of Decision Making and Motion Planning Framework for Enhanced Oscillation-Free Capability, Zhuoren Li, Jia Hu, Bo Leng, Lu Xiong and Zhiqiang Fu, IEEE Trans. Intell. Transp. Syst., vol. 25, no. 6, pp. 5718-5732, June 2024.
-
Stability Enhanced Hierarchical Reinforcement Learning for Autonomous Driving with Parameterized Trajectory Action, Guizhe Jin, Zhuoren Li, Bo Leng, Wie Han and Lu Xiong, IEEE Intell. Transp. Syst. Conf. (ITSC), 2024, pp. 3020-3026.
-
Safe Reinforcement Learning of Lane Change Decision Making with Risk-Fused Constraint, Zhuoren Li, Lu Xiong, Bo Leng, Puhang Xu and Zhiqiang Fu, in Proc. IEEE Intell. Transp. Syst. Conf. (ITSC), 2023, pp. 1313-1319.
-
A Seamless Motion Planning Integrating Maneuver Decision Based on Hybrid Model Predictive Control, Chengen Tu, Zhuoren Li, Bo Leng and Lu Xiong, in Proc. IEEE Int. Intell. Transp. Syst., 2023, pp. 3228-3234.
-
A Probabilistic Method for Behavior Prediction of Intelligent and Connected Vehicles in Freeway, Lu Xiong, Yizhuo Guan, Bo Leng, Zhuoren Li, Autom. Mach. Learn., vol. 4, no. 3, 2023.
-
A Unified Trajectory Planning and Tracking Control Framework for Autonomous Overtaking Based on Hierarchical MPC, Zhuoren Li, Lu Xiong and Bo Leng, in Proc. IEEE Intell. Transp. Syst. Conf. (ITSC), 2022, pp. 937-944.
-
A Real-time Path Planner based on Improved Tentacle algorithm for Autonomous Vehicles, Zhuoren Li, Bo Leng, Chagen Luo, Liang Shao, Ruoling Yang and Chengen Tu, in Proc. IEEE Int. Conf. Big Data, Artificial Intelligence and Internet of Things Engineering (ICBAIE), 2022, pp. 629-634.
-
Path Planning Method for Perpendicular Parking Based on Vehicle Kinematics Model Using MPC Optimization, Zhuoren Li, Lu Xiong, Bo Leng, Zhiqiang Fu, Dequan Zeng, Yiming Hu and Mingzhi Wu, SAE Technical Papers, 2022-01-0085, 2022.
-
Real-time Local Path Planning for Intelligent Vehicle combining Tentacle Algorithm and B-spline Curve, Zhuoren Li, Lu Xiong, Dequan Zeng, Zhiqiang Fu, Bo Leng and Fengwu Shan, IFAC-PapersOnLine, 2021, 54(10): 51-58.
- HFO-LADRC lateral motion controller for autonomous road sweeper, Dequan Zeng, Zhuoping Yu, Lu Xiong, Zhigiang Fu, Zhuoren Li, Peizhi Zhang, Bo Leng and Fengwu Shan,Sensors, 20(8), 2274.
More publications can be found on my Google Scholar profile.
Submitted & Work in Progress:
-
A Survey of Reinforcement Learning-based Motion planning for Autonomous Driving: Lessons Learned from a Driving Task Perspective, Zhuoren Li, Guizhe Jin, Ran Yu, Zhiwen Chen, Wei Han, Nan Li, Lu Xiong, Bo Leng, Jia Hu, Ilya Kolmanovsky and Dimitar Filev, IEEE Trans. Neural Netw. Learn. Sys. (under review). arXiv.
-
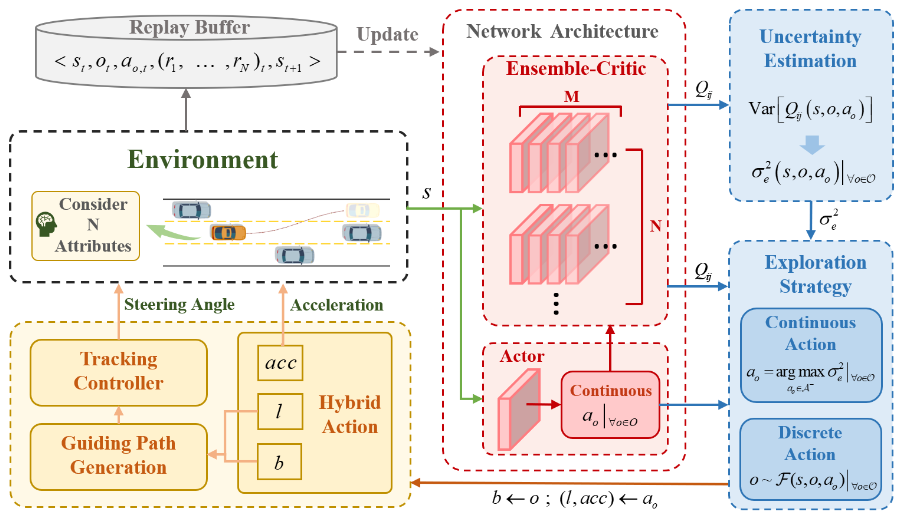
Hybrid Action Based Reinforcement Learning for Multi-Objective Compatible Autonomous Driving, Guizhe Jin, Zhuoren Li, Bo Leng, Wei Han, Lu Xiong and Chen Sun, IEEE Trans. Neural Netw. Learn. Sys. (under review, R1). arXiv.
-
Risk-Aware Reinforcement Learning for Autonomous Driving: Improving Safety When Driving through Intersection, Bo Leng, Ran Yu, Zhuoren Li*, Wei Han, Bo Leng, Lu Xiong and Hailong Huang, Eng. Appl. Artif. Intel (under review, R1) arXiv.
-
Safety Enhanced Reinforcement Learning for Autonomous Driving: Dare to Make Mistakes to Learn Faster and Better, Zhuoren Li, Jia Hu, Bo Leng, Lu Xiong and Puhang Xu, IEEE Trans. Intell. Transp. Syst. (under review, R1)
-
Efficient and Flexible Autonomous Parking Planning based on Adaptive Multi-Step Motion Primitives, Bo Leng, Zhiwen Chen, Zhuoren Li* and Lu Xiong, Journal of Intelligent Transportation Systems. (under review, R1)
🚗 Project Experiences
🎙 Interactive Learning-based Decision Control for Intelligent Vehicles with Roadside Information Enhancement
Chongqing Changan Automobile Co., Ltd., Apr. 2025 – Present, - Role: Student Technical Director
Responsibilities include:
- Comprehensive task management.
- Designed an Interaction-aware RL motion planning algorithm combining with game theory guidance
🎙 High-Mobility Motion Planning and Control Research for Chassis-by-wire All-terrain Unmanned Vehicle with Hybrid-steering
National Natural Science Foundation of China, Jan. 2024 – Present, - Role: Student Technical Director
Responsibilities include:
- Comprehensive task management.
- Designed an environmental risk characterization algorithm considering negative obstacles.
- Led the Development of a motion planning approach combining hybrid A* and optimization-based methods
🎙 Key Technology of Perception and Control in Cooperative Vehicle-Infrastructure System for Urban Public Transportation
National Key Research and Development Program of China, Jan. 2023 – Mar 2025, - Role: Core Participant
Responsibilities include:
- Developed the decision-making and motion planning algorithms for cruise driving and lane change functions in vehicle side, based on the recommended speed from the road side.
🎙 Development of Evasion Assistance Algorithm for Emergency Collision Avoidance based on Steer-by-Wire System
Shanghai Automotive Industry Science and Technology Development Foundation, Jul. 2022 – Jul. 2024, - Role: Student Technical Director
Responsibilities include:
- Comprehensive task management.
- Led the development of a motion control algorithm for emergency collision avoidance.
- Led the simulation validation in Carmaker/Simulink, steer-by-wire system modification on the real vehicle and ground test based on Audesse ECU.
🎙 Binary Mixed Traffic Behavior Characteristics and Collaborative Paradigm
Shanghai Science and Technology Commission, Aug. 2021 – Jul. 2024, - Role: Core Participant
Responsibilities include:
- Motion planning and control of connected automated vehicle according to the road-side guidance.
🎙 Research on Vehicle-Road Cooperative Control for Intelligent Public Transportation System
Shanghai Research Institute for Intelligent Autonomous Systems, Sept. 2021 – Aug. 2022, - Role: Student Technical Director
Responsibilities include:
- Comprehensive task management.
- Led the development of a signal control algorithm and a vehicle speed optimization algorithm.
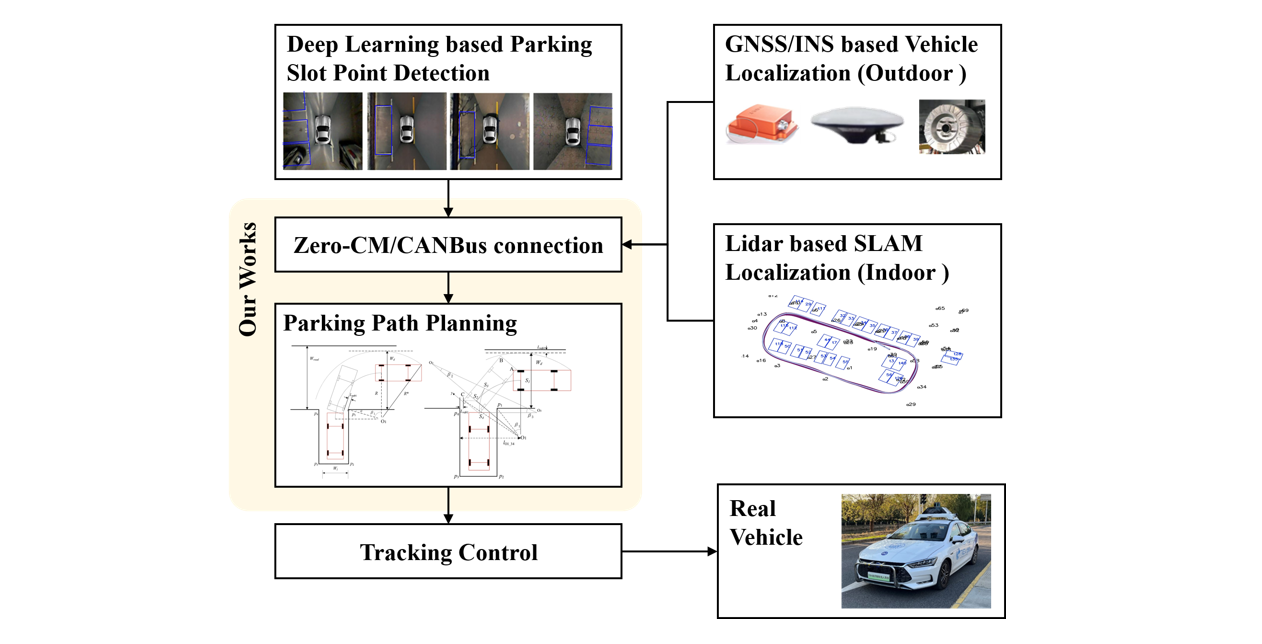
🎙 Autonomous Valet Parking (AVP) System Development
Nanchang Automotive Institute of Intelligence & New Energy, Sep. 2021 – Mar. 2023, - Role: Student Technical Director
Responsibilities include:
- Comprehensive task management.
- Led the development of a parking slot allocation algorithm.
- Developed parking path planning and tracking control algorithms.
🎙 Development and Application of Automatic Valet Parking System
Nanchang Automotive Institute of Intelligence & New Energy, Feb. 2020 – Mar. 2021, - Role: Student Technical Director
Responsibilities include:
- Comprehensive task management.
- Developed an integrated module for hardware and software communication.
- Developed a parking path planning algorithm based on geometric configuration.
- Developed a Stanley-based path tracking algorithm and a feedforward PID-based speed tracking algorithm.
🎙 China Future Challenge of Intelligent Vehicles
Institute of Intelligent Vehicles, Tongji University, Mar. 2020 – Nov. 2020, - Role: Major developer
Responsibilities include:
- Developed a system integration framework inspired by the Baidu Apollo.
- Developed a search-based path planning algorithm for static obstacle avoidance.
- Developed a parking path planning algorithm based on hybrid A*.
🎙 Funding/Grant Proposal Writing
Jan. 2020 – Mar. 2025
- National Natural Science Foundation of China (NSFC), Excellent Young Scholars Fund, 2025; Key Program, 2024; General Program, 2023; Distinguished Young Scholars Fund, 2022; Young Scholars Grant, 2020.
- Shanghai Municipal People’s Government (SMPG), Oriental Excellence Program Youth Project, 2024; Shanghai Science and Technology Progress First Award, 2022;
- Ministry of Science and Technology, PRC, National Key Research and Development Program of China, 2021;
- National Development and Reform Commission, The Breakthrough and Industrialization of Key Technologies for Intelligent Chassis, 2020;
🎖 Honors and Awards
-
SAE International Outstanding Technical Paper Award, SAE ICVS 2024. (TOP5)
-
High-Level Academic Poster Award, China SAE Doctoral Student Academic Forum, 2024. (TOP10%)
-
Outstanding Doctoral Student Scholarship, Tongji University, 2024. (TOP5%)
-
Vehicle-road-cloud Integrated Autonomous Driving Challenge, Third Prize, 2024.
-
Outstanding Individual Award, Institute of Intelligent Vehicles, Tongji University, 2022, 2023, 2024. (TOP5%)
-
World Artificial Intelligence Conference AI Driving Simulation Competition, Third Prize in the University Challenge Competition, 2022.
-
DongHua Test Scholarship of Science and Technology Innovation at Tongji University, 2016.
-
Third Prize, The 2nd Shanghai Uniersity Student Mechanics Competition, 2016.
-
Second Prize, The 32nd National University Student Physics Competition, Non-Physics Major Group, 2015.
📚 Academic Services
Reviewer
• Journal Reviewer: IEEE Transactions on Intelligent Transportation Systems (TITS), IEEE Transactions on Vehicular Technology (TVT), IEEE Transactions on Intelligent Vehicles (TIV), IEEE Transactions on Transportation Electrification (TTE), IEEE Robotics and Automation Letters (RAL), Journal of Intelligent Transportation Systems (JITS), IET Intelligent Transport Systems, Journal of Field Robotics, Automotive Innovation, Chinese Journal of Mechanical Engineering.
• Conference Reviewer: IV, ITSC, CVCI
Mentoring
I have been serving as the Student Director of the Intelligent Decision Research Group at TJU-IIV. I lead the team in studies on safe reinforcement learning, interactive behavior decision-making, and unstructured trajectory planning. To date, I have mentored 4 Ph.D. students, 13 master’s students, and several undergraduate students.
Ph.D. Students:
• 2025-present: Weiqi Zhang, focusing on E2E RL racing.
• 2023-present: Zhiwen Chen, focusing on LLM-enhanced RL for AD.
• 2022-present: Peiyuan Fang, focusing on Motion Planning under Off-road Environment; Xinrui Zhang, focusing on Cloud-Vehicle Cooperative Planning.
Master Students:
• 2024-present: Ran Yu, Trajectory Prediction and Safe-RL; Zhizhao Ni, LfD-based RL for Merging in Congested Traffic.
• 2023-present: Guizhe Jin, Multi-objective Compatible RL; Zhou Sun, Motion Planning under Off-road Environment.
• 2022-present: Yuqin Qi, Learning-based MPC for Adaptive Motion Control; Yu Che, Cloud-Vehicle Cooperative Tracking Control.
• 2021-2024: Ruolin Yang, Harmony-enhanced RL; Encheng Tu, Hybrid MPC Motion Planning for Autonomous Overtaking; Yizhuo Guan, Prediction and Control for Emergency Evasion.
• 2020-2023: Gesong Shi, Cooperative Control for Transit Priority.
• 2019-2022: Puhang Xu, Safe-RL Decision-Making; Hongyu Xiao, POMDP Motion Planning; Zixuan Qian, SMPC Motion Planning; Jie Gao: Global Planning.
🎓 Education
Ph.D. Student in Vehicle Engineering, Tongji University, 2019-now.
B.E. in Engineering Mechanics, Tongji University, 2014-2019.
Minor, Department of German, Tongji University, 2017-2018.